Рано или поздно, при постройке робота, возникнет нужда в точных перемещениях, например, когда захочется сделать манипулятор. Вариантов тут два — сервопривод , с обратными связями по току, напряжению и координате, либо шаговый привод. Сервопривод экономичней, мощней, но при этом имеет весьма нетривиальную систему управления и под силу далеко не всем, а вот шаговый двигатель это уже ближе к реальности.
Шаговый двигатель
это, как понятно из его названия, двигатель который вращается дискретными перемещениями
. Достигается это за счет хитрой формы ротора и двух (реже четырех) обмоток. В результате чего, путем чередования направления напряжения в обмотках можно добиться того, что ротор будет по очереди занимать фиксированные значения.
В среднем, у шагового двигателя на один оборот вала, приходится около ста шагов. Но это сильно зависит от модели двигателя, а также от его конструкции. Кроме того, существуют полушаговый
и микрошаговый режим
, когда на обмотки двигателя подают ШИМованное напряжение, заставляющее ротор встать между шагами в равновесном состоянии, которое поддерживается разным уровнем напряжения на обмотках. Эти ухищрения резко улучшают точность, скорость и бесшумность работы, но снижается момент и сильно увеличивается сложность управляющей программы — надо ведь расчитывать напряжения для каждого шага.
Один из недостатков шаговиков, по крайней мере для меня, это довольно большой ток. Так как на обмотки напруга подается все время, а такого явления как противоЭДС в нем, в отличии от коллекторных двигателей, не наблюдается, то, по сути дела, мы нагружаемся на активное сопротивление обмоток, а оно невелико. Так что будь готов к тому, что придется городить мощный драйвер на MOSFET транзисторах или затариваться спец микросхемами.
Типы шаговых двигателей
Если не углубляться во внутреннюю конструкцию, число шагов и прочие тонкости, то с пользовательской точки зрения существует три типа:
- Биполярный — имеет четыре выхода, содержит в себе две обмотки.
- Униполярный — имеет шесть выходов. Содержит в себе две обмотки, но каждая обмотка имеет отвод из середины.
- Четырехобмоточный — имеет четыре независимые обмотки. По сути дела представляет собой тот же униполярник, только обмотки его разделены. Вживую не встречал, только в книжках.
Где взять шаговый двигатель.
Вообще шаговики встречаются много где. Самое хлебное место — пятидюймовые дисководы
и старые матричные принтеры
. Еще ими можно поживиться в древних винчестерах на 40Мб, если, конечно, рука поднимется покалечить такой антиквариат.
А вот в трехдюймовых флопарях нас ждет облом — дело в том, что там шаговик весьма ущербной конструкции — у него только один задний подшипник, а передним концом вал упирается в подшипник закрепленный на раме дисковода. Так что юзать его можно только в родном креплении. Либо городить высокоточную крепежную конструкцию. Впрочем, тебе может повезет и ты найдешь нетипичный флопарь с полноценным движком.
Схема управления шаговым двигателем
Я разжился контроллерами шаговиков L297
и мощным сдвоенным мостом L298N.
Лирическое отступление, при желании можно его пропустить
Схема включения L298N+L297 до смешного проста — надо тупо соединить их вместе. Они настолько созданы друг для друга, что в даташите на L298N идет прямой отсыл к L297 , а в доке на L297 на L298N .
Осталось только подключить микроконтроллер.
- На вход CW/CCW подаем направление вращения — 0 в одну сторону, 1 — в другую.
- на вход CLOCK — импульсы. Один импульс — один шаг.
- вход HALF/FULL задает режим работы — полный шаг/полушаг
- RESET сбрасывает драйвер в дефолтное состояние ABCD=0101.
- CONTROL определяет каким образом задается ШИМ, если он в нуле, то ШИМ образуется посредством выходов разрешения INH1 и INH2 , а если 1 то через выходы на драйвер ABCD. Это может пригодится, если вместо L298 у которой есть куда подключать входы разрешения INH1/INH2 будет либо самодельный мост на транзисторах, либо какая-либо другая микросхема.
- На вход Vref
надо подать напряжение с потенциометра, которое будет определять максимальную перегрузочную способность. Подашь 5 вольт — будер работать на пределе, а в случае перегрузки сгорит L298
, подашь меньше — при предельном токе просто заглохнет. Я вначале тупо загнал туда питание, но потом передумал и поставил подстроечный резистор — защита все же полезная вещь, плохо будет если драйвер L298
сгорит.
Если же на защиту пофигу, то можешь заодно и резисторы, висящие на выходе sense выкинуть нафиг. Это токовые шунты, с них L297 узнает какой ток течет через драйвер L298 и решает сдохнет он и пора отрубать или еще протянет. Там нужны резисторы помощней, учитывая что ток через драйвер может достигать 4А, то при рекомендуемом сопротивлении в 0.5 Ом, будет падение напряжения порядка 2 вольт, а значит выделяемая моща будет около 4*2=8 Вт — для резистора огого! Я поставил двухваттные, но у меня и шаговик был мелкий, не способный схавать 4 ампера.
Николай Гурылёв.
Здравствуйте Юрий Валерьевич! Опишу изменения в схеме > Что меня подвигло к изменению схемы? В исходной схеме управление двигателем производится двумя кнопками каждая, из которых содержит по две группы контактов. Одна группа подаёт высокий логический уровень на вход микросхем, другая подаёт питание на двигатель. В виду того, что некоторые двигатели потребляют значительный ток, группа контактов, управляющая двигателем должна быть достаточно мощной, а, следовательно, и габаритной.
Это конечно не удобно и не желательно в виду снижения надёжности устройства по причине использования механических контактов в сильноточных цепях. Я предлагаю управлять питанием двигателя при помощи мощного полевого транзистора, который в свою очередь управляется теми же кнопками. При замыкании кнопок SB-1 или SB-2 высокий логический уровень через логический элемент ИЛИ образованный диодами VD-6 и VD-7 поступает на затвор полевого транзистора VT-5,открывая его, и тем самым замыкая цепь питания двигателя. Это даёт возможность разделить цепи питания и управления, и использовать для управления миниатюрные слаботочные кнопки например тактовые кнопки и кроме того даёт возможность производить управление от внешнего устройства (например компьютера) подачей соответствующих логических уровней. Естественно через дополнительное устройство согласования. Можно ещё реализовать пошаговое управление, но не буду усложнять. Ведь это ПРОСТОЕ устройство. Диоды можно применить любые, кремниевые, какие влезут. Полевой транзистор следует выбирать исходя из напряжения питания и потребляемого тока применяемого двигателя. Полевых транзисторов сейчас продаётся много различной мощности с напряжениями сток-исток до сотен вольт и с токами стока до десятков ампер. Если применяется низковольтный двигатель, то желательно и транзистор выбирать низковольтный, так как у них меньшее сопротивление сток-исток, что предполагает меньшее падение напряжения и меньший нагрев и потери мощности.

По этой же причине желательно и в качестве VT1-VT5, так же использовать полевики с N-каналом. В этом случае сопротивление резисторов в цепи базы можно уменьшить, это не приведёт к перегрузке логических элементов. В исходной схеме не указан тип применённого стабилизатора, но я думаю, что 12вольт будет как раз. Следует учитывать, что мощные полевики, как правило, начинают интенсивно открываться при напряжении на затворе около 4 вольт и насыщаются при напряжении около 10 вольт. Вот вроде и всё. Изменённая схема и изменённая печатка прилагаются.
При конструировании очередного станка с ЧПУ, а попросту 3-х осевого фрезерного-сверлильного станочка для печатных плат и мелких фрезерных работ, у меня появилось неугомонное желание разложить всё «по полочкам».
Многие скажут, что тема не нова, существует множество проектов, множество технических и программных решений. Но, плавая в этом море информации, я постарался убрать всю «воду» и получить «сухой остаток».
Вот что из этого получилось…
Задача построения станка обычно сводится к трем подзадачам - механика, электроника, программное обеспечение. Видимо и статьи придется писать тоже три.
Поскольку у нас журнал всё-таки практической электроники, начну с электроники и чуть-чуть с механики!
Привод
Нужно двигать собственно фрезер в 3-х направлениях - XYZ, значит нужно 3 привода - 3 мотора с передачей вращения вала двигателя в линейное перемещение.О передаче…
Для фрезерного станка, где есть боковые усилия резания материала, желательно не применять ременные передачи, очень популярные в 3D принтерах. Буду применять передачу «винт-гайка». Самая бюджетная передача - обычный стальной винт и безлюфтовая, желательно бронзовая, гайка. Более правильная - винт с трапециевидной резьбой и гайка из капролона. Самая хорошая (и, увы, самая дорогая) шарико-винтовая пара, или ШВП. Об этом подробнее я еще расскажу далее…
У каждой передачи есть свой коэффициент, свой шаг - то есть насколько линейно по оси переместится фрезер за один оборот двигателя, например, на 4 мм.
Двигатель (мотор)
В качестве двигателя для привода определил шаговый двигатель (ШД)Почему шаговый? Что это вообще такое?
Двигатели есть переменного и постоянного тока, коллекторные и бесколлекторные, и так называемые «шаговые». В любом случае нам надо обеспечить какую-то точность позиционирования, например 0,01 мм. Как это сделать? Если двигатель имеет прямой привод - вал двигателя соединяют напрямую с винтом, то для обеспечения такой точности нужно повернуть его на некоторый угол. В данном случае, при шаге передачи 4 мм и желаемой точности перемещения 0,01 мм это… всего 1/400 оборота, или 360/400=0,9 градуса! Ерунда, возьмем обычный моторчик…
С «обычным» моторчиком без обратной связи никак не получится. Не вдаваясь в подробности, схема управления двигателем должна «знать», на какой угол повернулась ось. Можно конечно поставить редуктор - потеряем в скорости, и все равно без гарантии, без обратной связи вообще никак! На ось ставится датчик угла поворота. Такое решение надежное, но дорогое.
Альтернатива - шаговый двигатель (как он работает, почитайте сами). Можно считать, что за одну «команду» он повернет свою ось на определенный градус, обычно это 1,8 или 0,9 градуса (точность обычно не хуже 5%) - как раз то, что нужно. Недостаток такого решения - при большой нагрузке двигатель будет пропускать команды - «шаги» и может вообще остановиться. Вопрос решается установкой заведомо мощного двигателя. На шаговых двигателях и делается большинство любительских станочков.
Выбираем шаговый двигатель
2 обмотки, с минимальным током, минимальной индуктивностью и максимальным моментом - то есть максимально мощный и экономичный двигатель.Противоречивые требования. Малый ток - значит большое сопротивление, значит много витков провода обмотки двигателя, значит большая индуктивность. А большой момент - это большой ток и много витков. Выбираем в пользу большего тока и меньшей индуктивности. А момент надо выбирать исходя из нагрузки, но об этом потом.
Характеристики некоторых двигателей приведены в таблице:

Для небольшого станка с рабочим пространством размером 300×300х100 мм и легким фрезером вполне сгодятся двигатели с крутящим моментом 0,3Нм и выше. Оптимальным является ток от 1,5 до 2,5 Ампер, вполне подойдет FL42STH38-1684
Драйвер шагового двигателя
Двигатель есть. Теперь нужен драйвер - переключать напряжение на обмотках двигателя определенным образом, при этом не превышая установленный ток.Самое простое решение - источник заданного тока и две пары транзисторных ключей на каждую обмотку. И четыре защитных диода. И логическая схема чтобы менять направление. И… Такое решение обычно делают на микросхеме ULN2003A для двигателей с малым током, имеет много недостатков, не буду на них останавливаться.
Альтернатива - специализированные микросхемы «всё в одном» - с логикой, транзисторами и диодами защиты внутри (или снаружи). А еще такие микросхемы контролируют ток обмоток и регулируют его с помощью ШИМ-а, а так же могут реализовывать режим «полушаг», а некоторые режимы 1/4 шага, и 1/8 шага и т. д. Эти режимы позволяют повысить точность позиционирования, повысить плавность движения и снизить резонанс. Обычно достаточно режима «полушаг», что позволит повысить теоретическую точность линейного позиционирования (в моем примере до 0,005 мм).
Что внутри микросхемы драйвера шагового двигателя? Блок логики и управления, источники питания, ШИМ со схемами формирования момента и времени коммутации обмоток, выходные ключи на полевых транзисторах, компараторы обратной связи - ток контролируется по падению напряжения на резисторах (Rs) в цепи питания обмоток. Ток двигателя задается опорным напряжением.
Для реализации этих функций существуют и другие схемные решения, например, с использованием микроконтроллеров PIC или ATMEGA (опять же с внешними транзисторами и защитными диодами). На мой взгляд, они не обладают значительным преимуществом перед «готовыми» микросхемами и я их в данном проекте использовать не буду.
Богатство выбора
На сегодняшний день есть достаточно много различных микросхем и достаточно много уже готовых плат и модулей драйверов ШД. Можно купить готовый, а можно «изобретать велосипед», тут каждый решает по-своему.
Из готовых - наиболее распространённые и недорогие драйверы на микросхемах Allegro A4988 (до 2А), Texas Instruments DRV8825 (до 2,5А).
Поскольку модули изначально разрабатывались для использования в 3D принтерах типа Rep-rap проекта Arduino, они не являются законченными модулями (например, им нужно еще питание логики (+5V), которое подается с так называемой рампы (Ramp).
Еще есть решения на DRV8811 (до 1,9 А), A3982 (до 2 А), A3977 (до 2,5 А), DRV8818 (до 2,5 А) DRV8825 (до 2,5 А), Toshiba TB6560 (до 3 А) и другие.
Поскольку мне интересно что-то сделать самому, плюс появилась возможность «попробовать на вкус» микросхемы Allegro A3982 и A3977, решил сделать пару драйверов самостоятельно.
Готовые решения на A4988 не понравились, прежде всего, из-за миниатюризации размеров печатной платы в ущерб хорошему охлаждению. Типовое сопротивление открытых транзисторов у A4388 при токе 1,5А 0,32+0,43 Ом, плюс 0,1-0,22 Ома «измерительный» резистор - получается около 0,85 Ом. А таких каналов два, и хотя и работают они импульсно, но 2-3 Ватта тепла надо рассеивать. Ну не верю я в многослойную плату и малюсенький радиатор охлаждения - в даташите нарисована плата гораздо больших размеров.
Провода мотора нужно сделать короткими, драйвер устанавливать рядом с двигателем. Существует 2 технических решения в звукотехнике: длинный сигнальный кабель к усилителю + короткие провода к акустической системе, или короткий сигнальный кабель к усилителю + длинные провода, а акустической системе. Оба решения имеют свои плюсы и минусы. С моторами - так же. Я выбрал длинные провода управления и короткие провода к мотору.
Управляющие сигналы - «шаг» (step), «направление» (dir), «включение» (enable), индикация состояния сигналов управления. Некоторые схемы не используют сигнал «Enable», но это приводит в режиме простоя к ненужному нагреву и микросхемы и двигателя.
Одно питание 12-24 вольта, источник питания логики (+5B) - на плате. Размеры платы - достаточные для хорошего охлаждения, двухсторонняя печать с большой областью «меди», возможность приклеить на микросхему радиатор (применяемой для охлаждения памяти видеокарт).
Драйвер ШД на микросхеме Allegro A3982

Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2 А Типовое сопротивление открытых транзисторов (при токе 1,5А): 0,33+0,37 Ом
Драйвер ШД на микросхеме Allegro A3977
Основные характеристики и блок-схема:
Напряжение питание силовое: 8…35 В Напряжение питание логики: 3,3…5 В Выходной ток (максимальный, зависит от режима и охлаждения): ±2,5 А Типовое сопротивление открытых транзисторов (при токе 2,5А): 0,33+0,45 Ом
Схема и прототип


Проектировал в среде DipTrace. Драйвер A3982 включен по схеме из документации производителя. Включен режим «полушаг». Дополнительно для надежной работы сигналов управления и индикации применил микросхему логики 74НС14 (с триггерами Шмитта). Можно было сделать гальвано-развязку на оптронах, но для маленького станка я решил ее не делать. Схема на A3977 отличается только дополнительными джамперами режима шага и более мощным разъемом питания, пока в «железе» не реализована.
Печатная плата
Процесс изготовления - ЛУТ, двухсторонняя. Габариты 37×37 мм, крепеж - как у двигателей, 31×31 мм.
Для сравнения - слева мое творчество, справа драйвер на A4988.
В статье приводятся принципиальные схемы вариантов простого, недорогого контроллера шагового двигателя и резидентное программное обеспечение (прошивка) для него.
Общее описание.
Контроллер шагового двигателя разработан на PIC контроллере PIC12F629. Это 8 выводной микроконтроллер стоимостью всего 0,5 $. Несмотря на простую схему и низкую стоимость комплектующих, контроллер обеспечивает довольно высокие характеристики и широкие функциональные возможности.
- Контроллер имеет варианты схем для управления как униполярным, так и биполярным шаговым двигателем.
- Обеспечивает регулировку скорости вращения двигателя в широких пределах.
- Имеет два режима управления шаговым двигателем:
- полношаговый;
- полушаговый.
- Обеспечивает вращение в прямом и реверсивном направлениях.
- Задание режимов, параметров, управление контроллером осуществляется двумя кнопками и сигналом ВКЛ (включение).
- При выключении питания все режимы и параметры сохраняются в энергонезависимой памяти контроллера и не требуют переустановки при включении.
Контроллер не имеет защиты от коротких замыканий обмоток двигателя. Но реализация этой функции значительно усложняет схему, а замыкание обмоток – случай крайне редкий. Я с таким не сталкивался. К тому же механическая остановка вала шагового двигателя во время вращения не вызывает опасных токов и защиты драйвера не требует.
Про режимы и способы управления шаговым двигателем можно почитать , про дайверы .
Схема контроллера униполярного шагового двигателя с драйвером на биполярных транзисторах.

Объяснять в схеме особенно нечего. К PIC контроллеру подключены:
- кнопки "+" и "–" (через аналоговый вход компаратора);
- сигнал ВКЛ (включение двигателя);
- драйвер (транзисторы VT1-Vt4 , защитные диоды VD2-VD9).
PIC использует внутренний генератор тактирования. Режимы и параметры хранятся во внутреннем EEPROM.
Схема драйвера на биполярных транзисторах КТ972 обеспечивает ток коммутации до 2 А, напряжение обмоток до 24 В.
Я спаял контроллер на макетной плате размерами 45 x 20 мм.

Если ток коммутации не превышает 0,5 А, можно использовать транзисторы серии BC817 в корпусах SOT-23. Устройство получится совсем миниатюрным.
Программное обеспечение и управление контроллером.
Резидентное программное обеспечение написано на ассемблере с циклической переустановкой всех регистров. Программа зависнуть в принципе не может. Загрузить программное обеспечение (прошивку) для PIC12F629 можно .
Управление контроллером достаточно простое.
- При активном сигнале "ВКЛ" (замкнут на землю) двигатель крутится, при неактивном (оторван от земли) – остановлен.
- При работающем двигателе (сигнал ВКЛ активен) кнопки "+" и "–" меняют скорость вращения.
- Каждое нажатие на кнопку "+" увеличивает скорость на минимальную дискретность.
- Нажатие кнопки "–" - уменьшает скорость.
- При удержании кнопок "+" или "–" скорость вращения плавно увеличивается или уменьшается, на 15 значений дискретности в сек.
- При остановленном двигателе (сигнал ВКЛ не активен).
- Нажатие кнопки "+" задает режим вращения в прямом направлении.
- Нажатие кнопки "–" переводит контроллер в режим реверсивного вращения.
- Для выбора режима – полношаговый или полушаговый необходимо при подаче питания на контроллер удерживать кнопку "–" в нажатом состоянии. Режим управления двигателем будет изменен на другой (проинвертирован). Достаточно выдержать кнопку – нажатой в течение 0,5 сек.
Схема контроллера униполярного шагового двигателя с драйвером на MOSFET транзисторах.

Низкопороговые MOSFET транзисторы позволяют создать драйвер с более высоким параметрами. Применение в драйвере MOSFET транзисторов, например, IRF7341 дает следующие преимущества.
- Сопротивление транзисторов в открытом состоянии не более 0,05 Ом. Значит малое падение напряжения (0,1 В при токе 2 А), транзисторы не греются, не требуют радиаторов охлаждения.
- Ток транзисторов до 4 А.
- Напряжение до 55 В.
- В одном 8 выводном корпусе SOIC-8 размещены 2 транзистора. Т.е. на реализацию драйвера потребуется 2 миниатюрных корпуса.
Таких параметров невозможно достичь на биполярных транзисторах. При токе коммутации свыше 1 А настоятельно рекомендую вариант утройства на MOSFET транзисторах.
Подключение к контроллеру униполярных шаговых двигателей.
В униполярном режиме могут работать двигатели с конфигурациями обмоток 5, 6 и 8 проводов.
Схема подключения униполярного шагового двигателя с 5 и 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 6 проводов выводы промаркированы следующим цветами.

Конфигурация с 5 проводами это вариант, в котором общие провода обмоток соединены внутри двигателя. Такие двигатели бывают. Например, PM35S-048.

Документацию по шаговому двигателю PM35S-048 в PDF формате можно загрузить .
Схема подключения униполярного шагового двигателя с 8 проводами (выводами).
То же самое как и для предыдущего варианта, только все соединения обмоток происходят вне двигателя.
Как выбирать напряжение для шагового двигателя.
По закону Ома через сопротивление обмотки и допустимый ток фазы.
U = Iфазы * Rобмотки
Сопротивление обмотки постоянному току можно измерить, а ток надо искать в справочных данных.
Подчеркну, что речь идет о простых драйверах, которые не обеспечивают сложную форму тока и напряжения. Такие режимы используются на больших скоростях вращения.
Как определить обмотки шаговых двигателей, если нет справочных данных.
В униполярных двигателях с 5 и 6 выводами, средний вывод можно определить, измерив, сопротивление обмоток. Между фазами сопротивление будет в два раза больше, чем между средним выводом и фазой. Средние выводы подключаются к плюсу источника питания.
Дальше любой из фазных выводов можно назначить фазой A. Останется 8 вариантов коммутаций выводов. Можно их перебрать. Если учесть, что обмотка фазы B имеет другой средний провод, то вариантов становится еще меньше. Попутка обмоток фаз не ведет к выходу из строя драйвера или двигателя. Двигатель дребезжит и не крутится.
Только надо помнить, что к такому же эффекту приводит слишком высокая скорость вращения (выход из синхронизации). Т.е. надо скорость вращения установить заведомо низкую.
Схема контроллера биполярного шагового двигателя с интегральным драйвером L298N.
Биполярный режим дает два преимущества:
- может быть использован двигатель с почти любой конфигурацией обмоток;
- примерно на 40% повышается крутящий момент.
Создавать схему биполярного драйвера на дискретных элементах – дело неблагодарное. Проще использовать интегральный драйвер L298N. Описание на русском языке есть .
Схема контроллера с биполярным драйвером L298N выглядит так.

Драйвер L298N включен по стандартной схеме. Такой вариант контроллера обеспечивает фазные токи до 2 А, напряжение до 30 В.
Подключение к контроллеру биполярных шаговых двигателей.
В этом режиме может быть подключен двигатель с любой конфигурацией обмоток 4, 6, 8 проводов.
Схема подключения биполярного шагового двигателя с 4 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с конфигурацией обмоток 4 провода выводы промаркированы следующим цветами.
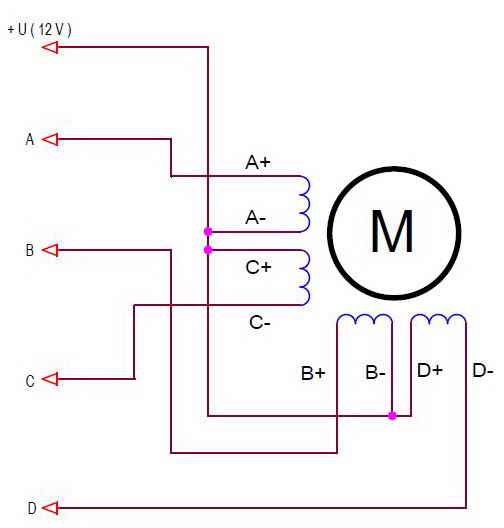
Схема подключения биполярного шагового двигателя с 6 проводами (выводами).

Для двигателей FL20STH, FL28STH, FL35ST, FL39ST, FL42STH, FL57ST, FL57STH с такой конфигурацией обмоток выводы промаркированы следующим цветами.
Такая схема требует напряжения питания в два раза большего по сравнению с униполярным включением, т.к. сопротивление обмоток в два раза больше. Скорее всего, контроллер надо подключать к питанию 24 В.
Схема подключения биполярного шагового двигателя с 8 проводами (выводами).
Может быть два варианта:
- с последовательным включением
- с параллельным включением.
Схема последовательного включения обмоток.

Схема с последовательным включением обмоток требует в два раза большего напряжения обмоток. Зато не увеличивается ток фазы.
Схема параллельного включения обмоток.

Схема с параллельным включением обмоток увеличивает в 2 раза фазные токи. К достоинствам этой схемы можно отнести, низкую индуктивность фазных обмоток. Это важно на больших скоростях вращения.
Т.е. выбор между последовательным и параллельным включением биполярного шагового двигателя с 8 выводами определяется критериями:
- максимальный ток драйвера;
- максимальное напряжение драйвера;
- скорость вращения двигателя.
Программное обеспечение (прошивка) для PIC12F629 можно загрузить .
Итак, задумывая драйвер на полевиках для биполярников, я и не думал что тема вызовет такой интерес и придется писать маленькую статью по сборке и настройке. Здесь будет рассматриваться драйвер как отдельный блок. Т.к. я использую блочную конструкцию. Т.е. три драйвера, интерфейсная плата, блок питания. Во первых при выходе из строя одного драйвера, просто меняется драйвер на запасной, а во вторых (и главное) планируется модернизация, мне проще снять один драйвер, и поставить модернизируемый вариант для обкатки. «Одноплатник» это уже развитие темы, и на вопросы по настройке ИБП я думаю с удовольствием ответит Dj _ smart , а также дополнит и поправит мой труд. А теперь к делу…
Пункт первый (набившим плату можно не читать J ). После травления, лужения, и сверловки, внимательно осмотрите всю плату на предмет косяков. Сопли, протравленные дорожки, и т.д. могут серьезно обломать весь кайф. Далее набиваем плату, сначала все перемычки, затем сопротивления, диоды, панели, емкости и биполярные транзисторы. Хочу обратить особое внимание на Ваше внимание, извините за… Не ленитесь перед впайкой проверить деталь на исправность. Прозвонка иногда спасает от дыма… Я зная цветовую кодировку резисторов на ура, подкалывался несколько раз, причем со спец. эффектами. Когда используешь резисторы из загашников которые годами выпаивались из всего что под руку попадет, забываешь, что при нагреве красный может стать оранжевым, а оранжевый - желтым… Впаиваем провода питания +5В, степ, GND , и провода контроля Vref . Примерно вот так это выглядит:

Пункт второй (настраиваем режимы работы и удержания). 555 я лично впаиваю в плату, кто поставил панель, значит втыкаем, блок индикации должен быть отключен. Подстроечники на середину. Вывод степ замыкаем на общий (раб. режим). Прозваниваем цепь +5В и если нет короткого, включаем питание. Тестер подключен к контрольным точкам Vref (молодец Dj _ smart , предусмотрел на плате), если номиналы подстроечников и сопротивления между ними соответствуют схеме, то подстроечником раб. режима можно регулировать напряжение около 0 - 1В т.е. ток 0 - 5А. Настроим на 1А. Тут все просто. R изм. у нас 0,2 Ом. Нам нужен 1А. 0,2х1=0,2В. Т.е. если мы установим Vref - 0,2В, ток в обмотке будет 1А. Если нам нужен ток в обмотке скажем 2,5А, то Vref =0,2х2,5=0,5В.
Короче мы выставили 0,2В.

Теперь размыкаем степ и общ. Если все элементы в норме и по схеме, то после размыкания примерно через полсекунды Vref снизится вдвое (если второй подстроечник посередине) Настраиваем им Vref удержания. У меня 50 проц. от рабочего:

Главное обратите внимание на обязательную задержку при переключении. При замыкании степ на общий, мгновенно должен включаться рабочий режим, а при размыкании уходить на удержание с задержкой 0.5с. Если задержки нет ищите проблемы, иначе при работе будут не хилые глюки. Если не заводится, идите в тему форума, не устраивайте пожаров J .
Пункт третий (настраиваем блок индикации). Печатка разведена под 315-361, как и у Dj _ smarta тоже мешок, надо куда то паять… Но в принципе туда можно паять любую пару, из наших я испытывал 502 - 503, 3102 - 3107, все пашет, только будьте внимательны с цоколевкой! Если все правильно впаяно и рабочее, то работает без проблем. Индикация вносит небольшую корректировку в Vref , так что после подключения индикации, окончательно отрегулируйте ток под свой ШД (лучше для начала 70% от номинального). Фотки как горят светодиоды делать не стал J .
Пункт четвертый, важный (297) Выключив питание втыкаем 297 на свое место. Еще раз проверяем монтаж, и элементы обвязки, если все ОК (при любом сомнении проверяем дважды) врубаем питание. Проверяем осциллографом сигнал на первой ноге, он такой:

Либо на 16 ноге, он такой:

Это означает что шим запустился, счастливчики имеющие частотомер могут померить частоту, она очень приблизительно должна соответствовать 20кГц.
ВНИМАНИЕ!!! Это важно!!! Даже если шим не запустится, логическая часть 297 будет работать, т.е. при подключении нагрузки все сигналы пойдут… Но прикиньте 24В без шима на ШД 2Ом. Так что важно убедиться в запуске генератора микросхемы.
Пункт пятый. Опять выключаем питание и вставляем IR , впаиваем полевики. При использовании ШД с током обмотки более 2,5А, необходимо полевики вынести на радиатор. Обратите внимание при впайке диодов, они могут различаться по меткам. Мне правда не встречалось (у меня в перемешку 522 и 1 N 4148 (аналог) у них цоколевка совпадает) Но учитывая что людям IR